MicroPython は、マイクロコントローラーや組み込みシステムで広く使用されています。 MicroPython IDE 内にコードとライブラリを記述し、複数のセンサーを接続できます。この記事では、ESP32 と HC-SR04 センサーを使用して距離を測定する方法について説明します。
MicroPython を使用した HC-SR04 超音波センサーを搭載した ESP32
ESP32 を超音波と接続するには、2 本のワイヤを接続するだけです。超音波センサーを使用して、物体の距離を測定し、車両の衝突回避システムなど、このシステムに基づいて応答をトリガーできます。

ESP32 やその他のマイクロコントローラー向けに設計された言語である MicroPython を使用すると、 HC-SR04 . SONAR 波がセンサーからオブジェクトに到達し、オブジェクトに戻るまでにかかる時間を計算する MicroPython コードが記述されます。後で距離の式を使用して、オブジェクトの距離を計算できます。
HC-SR04センサーの主なハイライトは次のとおりです。
| 特徴 | 価値 |
| 動作電圧 | DC5V |
| 動作電流 | 15mA |
| 動作周波数 | 40KHz |
| 私の範囲 | 2cm/1インチ |
| 最大範囲 | 400cm/13フィート |
| 正確さ | 3mm |
| 測定角度 | <15度 |
HC-SR04 ピン配列 HC-SR04には以下が含まれます 四 ピン:
- Vcc: ESP32のVinピンに接続
- グランド: GNDに接続
- トリガー: ESP32 ボードから制御信号を受信するためのピン
- エコー: 信号を送り返します。マイクロコントローラ ボードはこの信号を受信し、時間を使用して距離を計算します。

超音波のしくみ
HC-SR04センサーがESP32に接続された後、 トリガー ピンはボードによって生成されます。信号が HC-SR04 センサーのトリガー ピンで受信されると、超音波が生成され、センサーを離れて物体または障害物に当たります。ヒット後、オブジェクトの表面に跳ね返ります。
反射波がセンサー受信端に戻ると、エコーピンで信号パルスが生成されます。 ESP32 はエコー ピン信号を受信し、オブジェクトとセンサー間の距離を計算します。 距離式。

計算された合計距離は、ESP32 コード内で 2 で割る必要があります。これは、最初に取得した距離が、センサーからオブジェクトまでの合計距離に等しく、センサーの受信側に戻るためです。したがって、実際の距離は、その距離の半分に等しい信号です。
回路図
以下は、ESP32 と超音波センサーを接続するための回路図です。
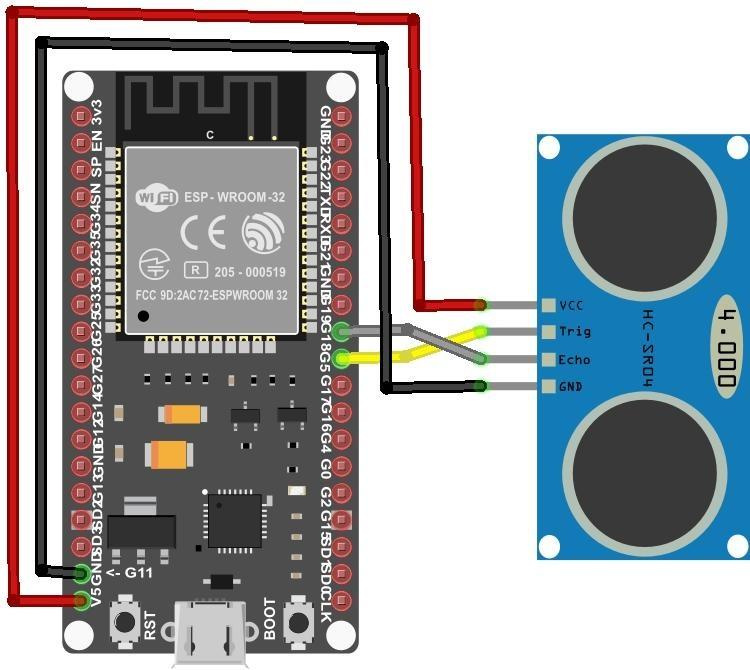
センサーのトリガーとエコーピンをそれぞれ ESP32 の GPIO 5 と GPIO 18 に接続します。また、ESP32 の GND と Vin ピンをセンサー ピンに接続します。
| HC-SR04 超音波センサー | ESP32 ピン |
| トリガー | GPIO5 |
| エコー | GPIO18 |
| アース | アース |
| VCC | 来て |
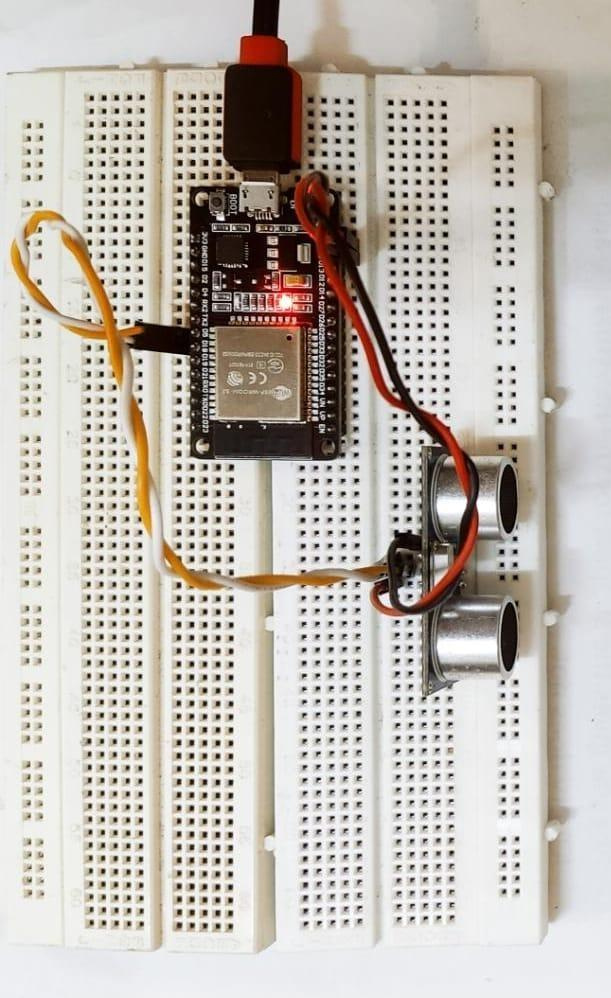
ハードウェア
超音波センサーをプログラムするには、次のコンポーネントが必要です。
- ESP32
- HC-SR04
- ブレッドボード
- ジャンパー線
MicroPython を使用して ESP32 で Ultrasonic HC-SR04 をセットアップする方法
ESP32 に超音波センサーをプログラムする前に、ライブラリをインストールする必要があります。 ESP32 ボードを PC に接続します。手順に従って、MicroPython を使用して Thonny IDE で超音波センサーを使用して ESP32 の構成を完了します。
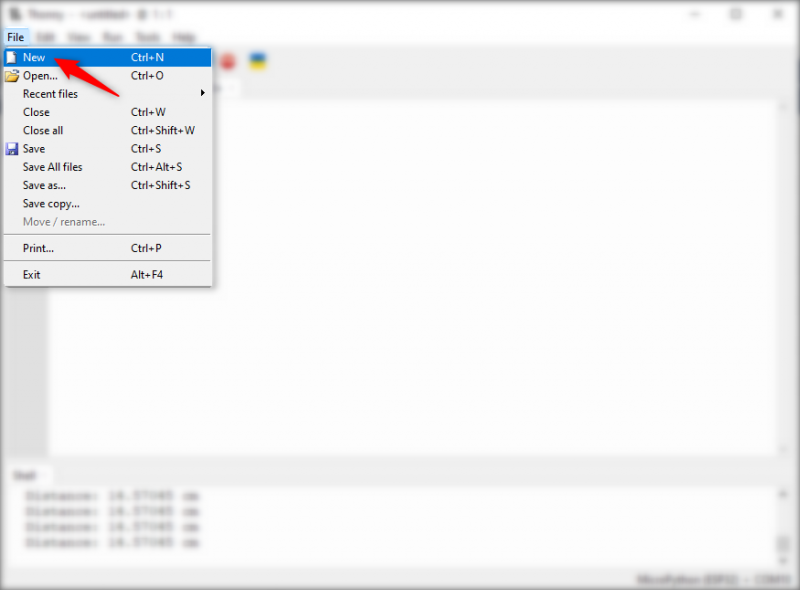
ステップ1: Thonny IDE を開きます。エディタ ウィンドウで新しいファイルを作成する :ファイル>新規 または押す Ctrl + N .
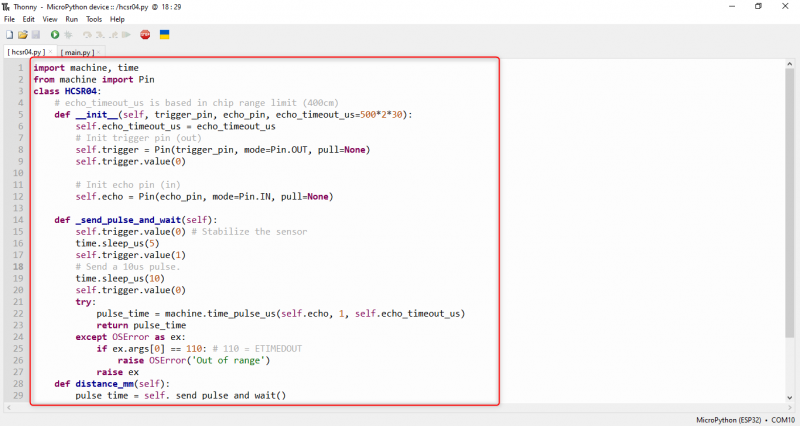
新しいファイルが開いたら、次のコードを Thonny IDE エディター ウィンドウに貼り付けます。
輸入 機械 、 時間から 機械 輸入 ピン
クラス HCSR04:
# echo_timeout_us はチップ範囲制限 (400cm) に基づいています
デフォルト __ホット__ ( 自己 、 トリガーピン 、 echo_pin 、 echo_timeout_us = 500 * 2 * 30 ) :
自己 . echo_timeout_us = echo_timeout_us
# 初期化トリガーピン (out)
自己 . 引き金 = ピン ( トリガーピン 、 モード = ピン。 アウト 、 引く = なし )
自己 . 引き金 . 価値 ( 0 )
# エコーピンの初期化 (in)
自己 . エコー = ピン ( echo_pin 、 モード = ピン。 の 、 引く = なし )
デフォルト _send_pulse_and_wait ( 自己 ) :
自己 . 引き金 . 価値 ( 0 ) # センサーを安定させる
時間 . sleep_us ( 5 )
自己 . 引き金 . 価値 ( 1 )
# 10us パルスを送信します。
時間 . sleep_us ( 10 )
自己 . 引き金 . 価値 ( 0 )
試す :
pulse_time = 機械。 time_pulse_us ( 自己 . エコー 、 1 、 自己 . echo_timeout_us )
戻る pulse_time
を除外する OSエラー なので 元:
もしも 元。 引数 [ 0 ] == 110 : # 110 = ETIMEDOUT
高める OSエラー ( 「範囲外」 )
高める 元
デフォルト 距離_mm ( 自己 ) :
pulse_time = 自己 ._send_pulse_and_wait ( )
んん = pulse_time * 100 /// 582
戻る んん
デフォルト 距離_cm ( 自己 ) :
pulse_time = 自己 ._send_pulse_and_wait ( )
cms = ( pulse_time / 2 ) / 29.1
戻る cms
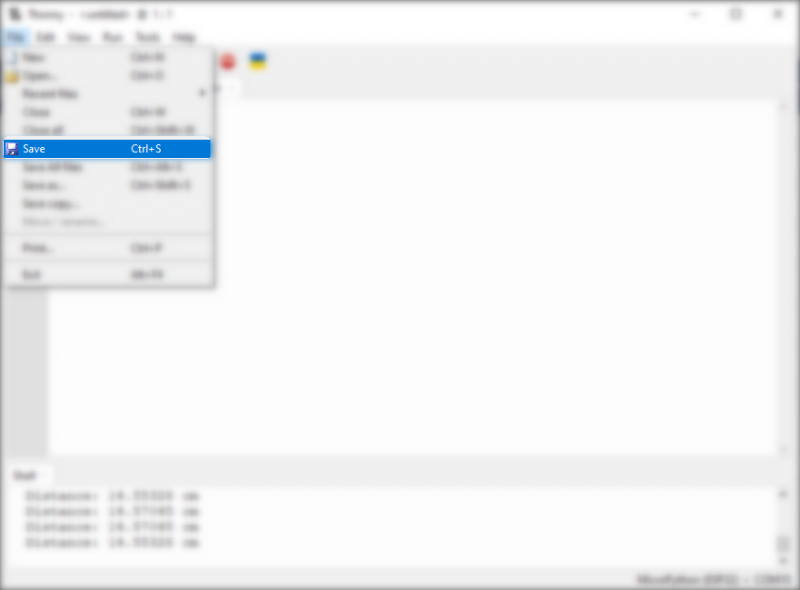
ステップ2: を書いた後、 図書館 エディター ウィンドウ内のコードを MicroPython デバイス内に保存する必要があります。
ステップ 3: に行く :ファイル>保存 または押す Ctrl + S .
ステップ 4: 新しいウィンドウが表示されます。 ESP32 が PC に接続されていることを確認します。ライブラリ ファイルを保存する MicroPython デバイスを選択します。
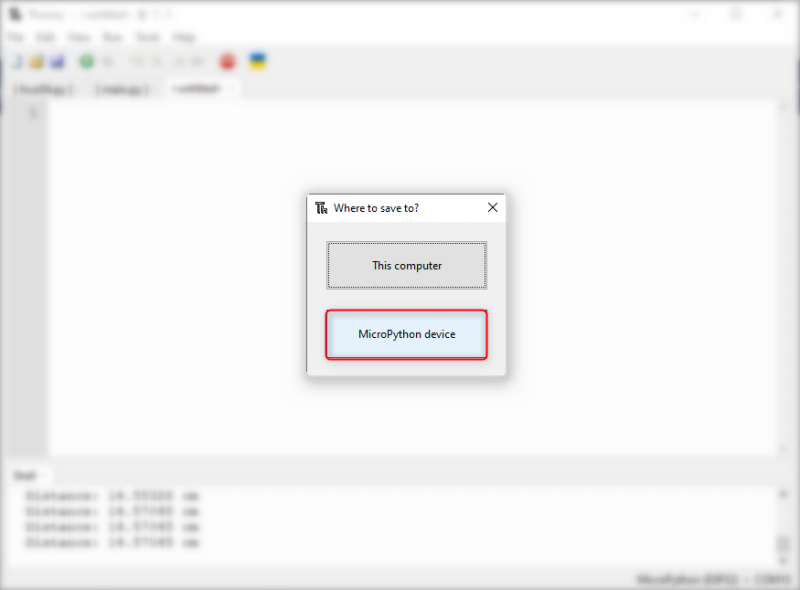
ステップ 5: 名前を付けて超音波ライブラリ ファイルを保存します。 hcsr04.py そしてクリック わかった .

これで、超音波 hcsr04 センサー ライブラリが ESP32 ボードに正常に追加されました。これで、コード内でライブラリ関数を呼び出して、さまざまなオブジェクトの距離を測定できるようになりました。
MicroPython を使用した超音波センサーのコード
超音波センサー コードの場合は、新しいファイルを作成します ( Ctrl + N )。エディタ ウィンドウで、以下のコードを入力し、 main.py また boot.py ファイル。このコードは、HC-SR04 の前に来るオブジェクトの距離を出力します。
次のような重要なライブラリを呼び出すことによって開始されるコード HCSR04 と 時間 ライブラリと一緒に 寝る 遅れを与える。
次に、名前を付けて新しいオブジェクトを作成しました センサー .このオブジェクトは、トリガー、エコー、およびタイムアウトの 3 つの異なる引数を取ります。ここでタイムアウトは、センサーが範囲外になった後の最大時間として定義されます。
センサー = HCSR04 ( トリガーピン = 5 、 echo_pin = 18 、 echo_timeout_us = 10000 )という名前の新しいオブジェクトの距離を測定して保存するには 距離 創造された。このオブジェクトは距離を cm 単位で保存します。
距離 = センサー。 距離_cm ( )mm 単位のデータを取得するには、次のコードを記述します。
距離 = センサー。 距離_mm ( )次に、結果を MicroPython IDE シェルに出力しました。
印刷する ( '距離:' 、 距離 、 'cm' )最後に 1 秒の遅延が与えられます。
寝る ( 1 )完全なコードを以下に示します。
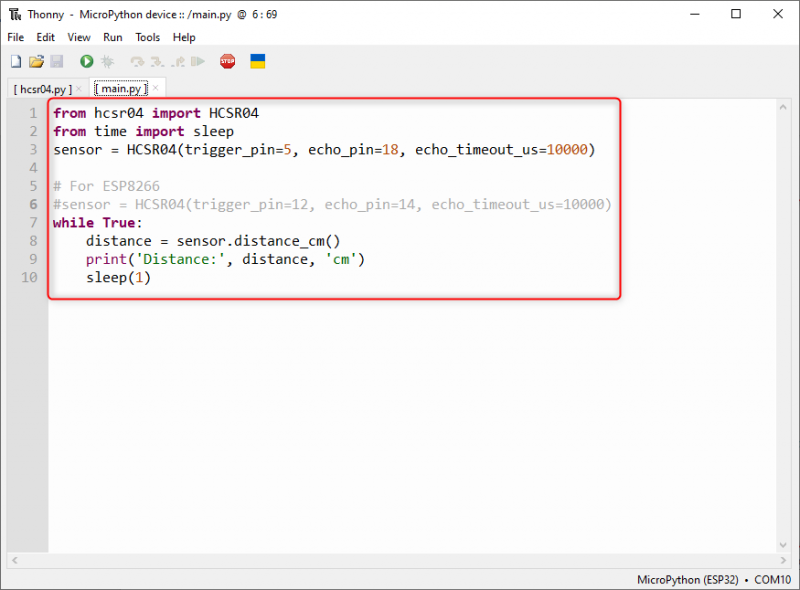
から hcsr04 輸入 HCSR04から 時間 輸入 寝る
# ESP32
センサー = HCSR04 ( トリガーピン = 5 、 echo_pin = 18 、 echo_timeout_us = 10000 )
# ESP8266
#sensor = HCSR04(trigger_pin=12, echo_pin=14, echo_timeout_us=10000)
その間 真実 :
距離 = センサー。 距離_cm ( )
印刷する ( '距離:' 、 距離 、 'cm' )
寝る ( 1 )
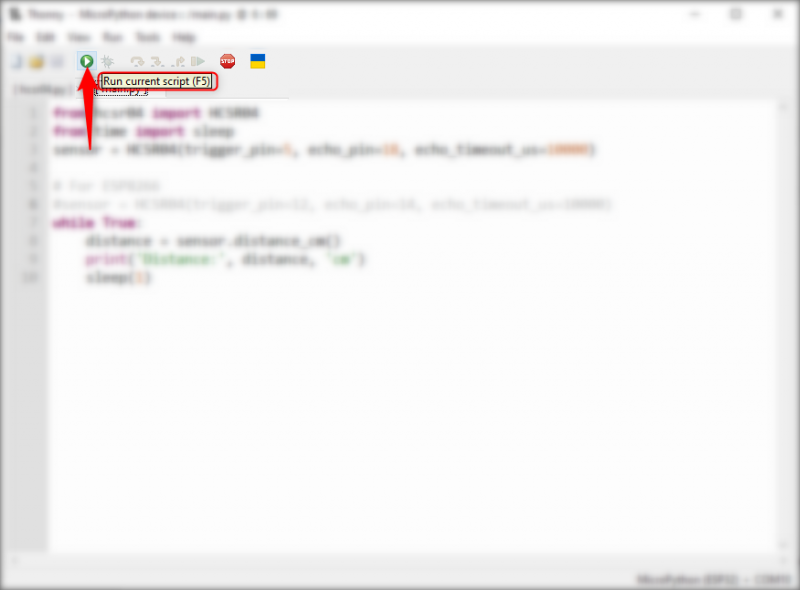
MicroPython デバイス内にコードを記述して保存した後、超音波センサーを実行します。 main.py ファイルコード。再生ボタンをクリックするか、 F5 .
物体が近くにあるときの超音波センサーの出力
超音波センサーの近くに物体を置き、測定された距離を Arduino IDE のシリアル モニター ウィンドウで確認します。
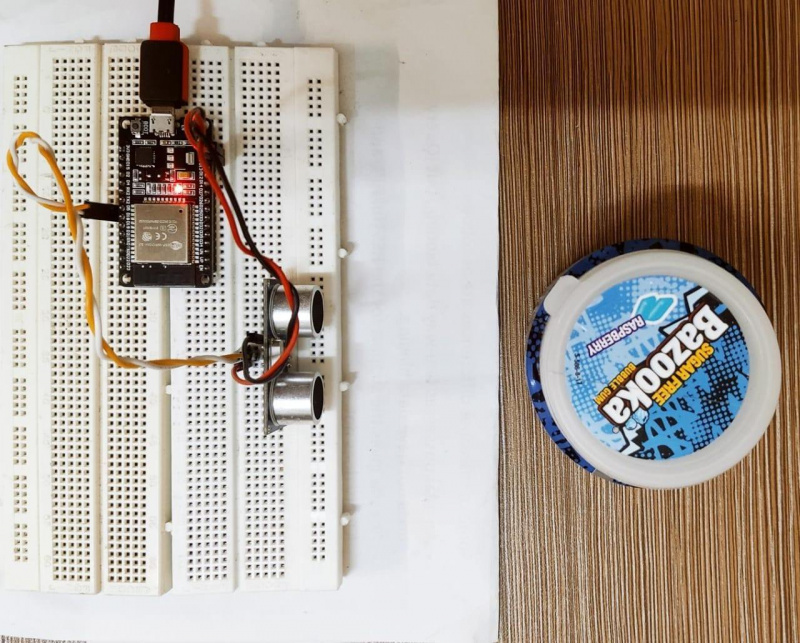
物体距離はシェル端末に表示されます。対象物は超音波センサーから 5 cm の位置に配置されます。

対象物が遠い場合の超音波センサーの出力
結果を確認するために、センサーから離れた場所にオブジェクトを配置し、超音波センサーの動作を確認します。以下の画像のようにオブジェクトを配置します。
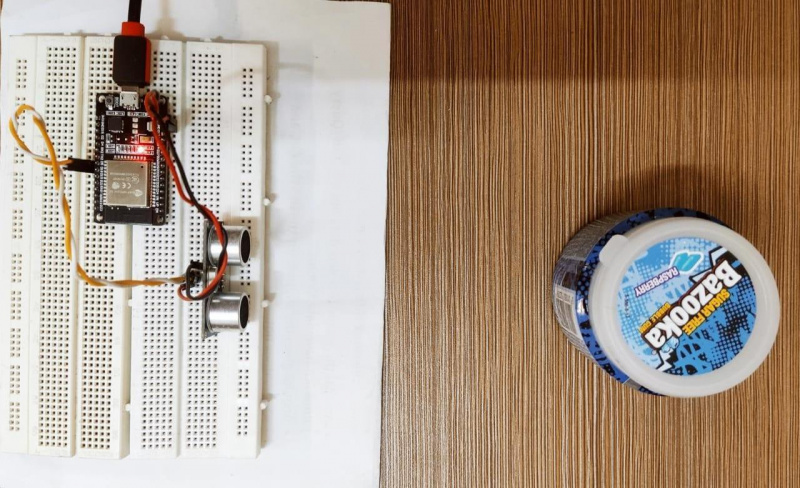
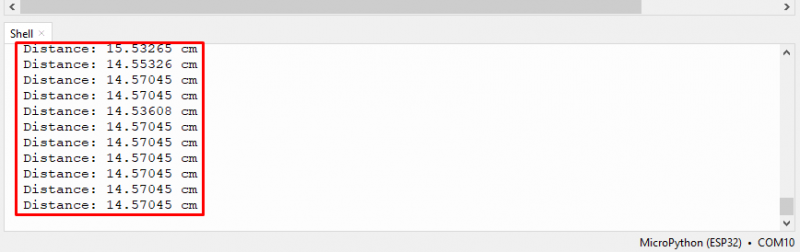
出力ウィンドウに新しい距離が表示されます。オブジェクトがセンサーから離れていることがわかります。したがって、測定された距離は約です。超音波センサーから 15 cm。
結論
距離の測定は、ロボット工学やその他のプロジェクトに関しては優れた用途があります。距離を測定するにはさまざまな方法があります。 ESP32 を搭載した HC-SR04 は、さまざまなオブジェクトの距離を測定できます。ここでは、ESP32 を統合して距離の測定を開始するために必要なすべての手順について説明します。