フィードバック システムには、従来のシステムに比べて複数の利点があります。これは、回路の出力ゲインを向上させ、回路の線形応答を向上させるのに役立ちます。また、主にノイズ信号によって発生する信号の歪みの可能性も軽減されます。
フィードバック システムは、主に増幅回路、出力ベースの制御システム、発振回路で使用されます。フィードバック システムには 2 つのタイプがあります。 ポジティブ フィードバックと ネガティブ フィードバック。この記事では、後者のタイプのフィードバックに重点を置きます。
概要:
- エレクトロニクスにおける負帰還システムとは
- 負帰還回路
- 負帰還伝達関数
- オペアンプの負帰還
- 例1
- 例 2
- 例 3
- 正帰還システムと負帰還システムの違い
- 負帰還システムの応用と性質
- 帯域幅に対する負のフィードバックの影響
- 結論
エレクトロニクスにおける負帰還システムとは
電気回路における負のフィードバックは、電気回路の動作を安定化および調整する制御メカニズムです。統合された負帰還システムを備えた回路は、出力信号を受け取り、それを入力に与えます。 逆相(反転)信号 。このフィードバック システムにより、出力信号の偏差や誤差が軽減されます。
ネガティブフィードバックとも呼ばれます 変性フィードバック 。負のフィードバックでは、フィードバックとして来る出力信号が入力基準信号から減算されます。出力では次のようなエラーが発生します。 フィードバックゲイン 。減算後に生成されるこのエラー信号は、それに応じてシステムの応答を変更します。システムのゲインが正の場合、出力からのフィードバック信号を入力基準信号から差し引いて、フィードバックを負に維持する必要があります。
ネガティブなフィードバックがあった場合、 減算された リファレンス入力からの入力により、システムがより安定します。異常な動作を示すシステムがあるとします。この変化に対抗するために、システムは出力信号を生成します。この出力またはフィードバック信号は入力信号を打ち消し、それに応じて入力を変更してシステム全体が効率的に動作するようにします。
負帰還回路
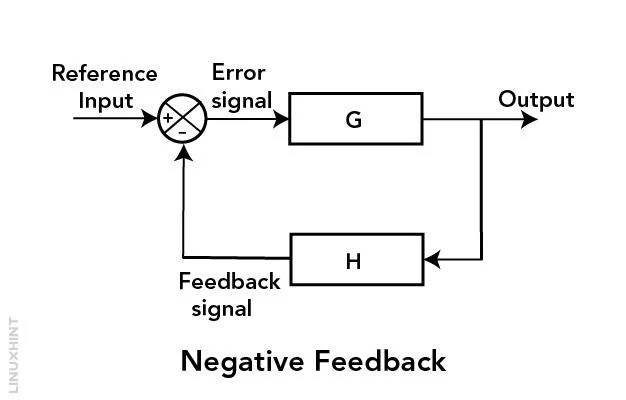
負帰還回路を下の図に示します。ここでは、出力信号がフィードバックとして入力側に戻されることがわかります。入力側では、基準信号とフィードバック信号の差が生成され、システムがさらに駆動されます。
1. コンポーネント : 回路は 2 つの主要コンポーネントで構成されます。
- ゲインGのアンプ。
- フィードバック係数 β を備えたフィードバック ループ。
入力信号はVです で アンプの出力は V です 外 。
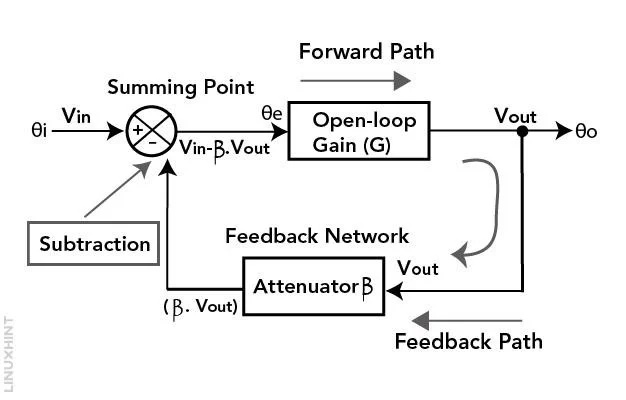
2. サミングジャンクション : アンプの入力にはサミングジャンクションがあります (多くの場合、内側にマイナス記号が付いた円で表されます)。このジャンクションはリファレンス入力からフィードバック信号を減算します。減算された部分はフィードバック係数 β と出力 Vout の積であるため、誤差信号は V になります。 で – bV 外 。
3. フィードバックループ : このエラー信号 (V で – bV 外 )がシステムを駆動するものです。目的の入力 V との差を表します。 で と実際の出力 V 外 フィードバック係数 β によってスケーリングされます。
4. 否定的なフィードバック : ここで重要な概念は否定的なフィードバックです。出力Vが 外 入力 V の外乱または変化による変化 で 誤差信号 (Vin – βV) 外 ) 創造された。計算された誤差信号はゲイン G のアンプによって増幅され、加算ジャンクションにフィードバックされます。重要なのは、このフィードバックは入力から差し引かれるため、負であるということです。
- Vの場合 外 増加 (つまり、システム出力が希望よりも高くなります) フィードバックにより誤差が減少し、V が増加します 外 希望の値に戻します。
- Vの場合 外 減少(つまり、システム出力が希望より低くなります) フィードバックが増加し、V を駆動する誤差が増加します 外 希望の値に向かってバックアップします。
5. 一般的なフィードバック式 : このシステムの一般的なフィードバック方程式は通常、次のように表されます。

この式は出力 V に関係します。 外 これは、システムが負のフィードバックを使用して、所望の入力に一致するように出力を調整および制御する方法を示しています。
負帰還伝達関数
伝達関数は、入力と出力の両方の関係を表す方程式を定義します。これは、入力の変更が出力にどのような影響を与えるかを示します。負のフィードバックでは、Z で表される中間信号があります。この中間信号は、出力と入力の差を表します。
のために 伝達関数 負のフィードバックの方程式、Z は、システムを出力の望ましい値に近づけるために必要な誤差信号または補正を計算するために使用されます。
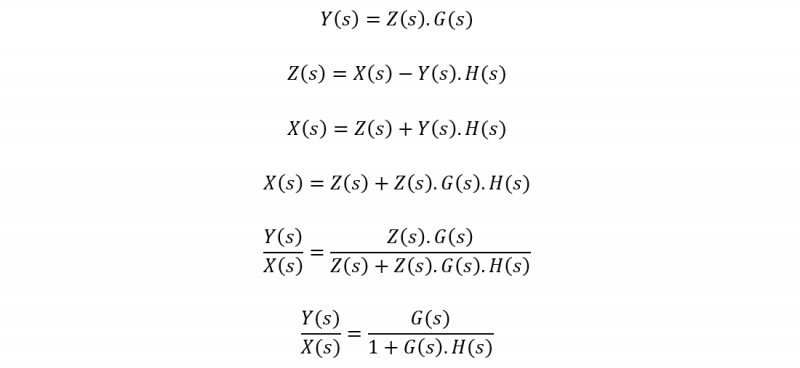
次のブロック図は負帰還システムを示しています。この図を使用すると、負のフィードバック システムの伝達関数を計算できます。
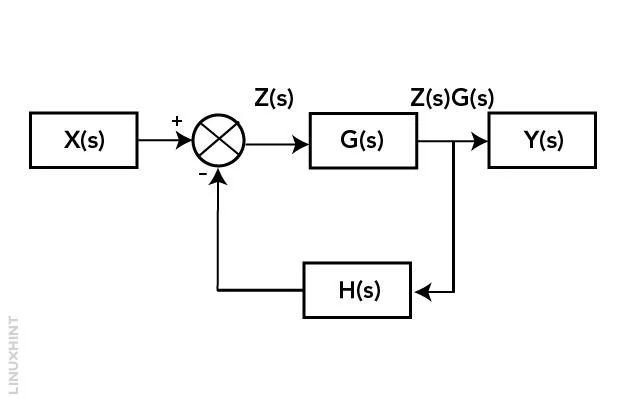
負のフィードバック システムの出力は Y(s) に等しくなります。
オペアンプの負帰還
負帰還構成では、オペアンプの出力 (V) の一部が入力反転 (-) 端子に与えられます。この出力信号は入力リファレンスから減算されます。アンプのゲインを制御し、安定させるのに役立ちます。
オペアンプ回路で負帰還を使用すると、システムの安定性を維持しながら、希望のゲイン レベルを設定できます。負のフィードバックにより、オペアンプ特性の非線形性が軽減され、オペアンプが理想的な動作に近づきます。
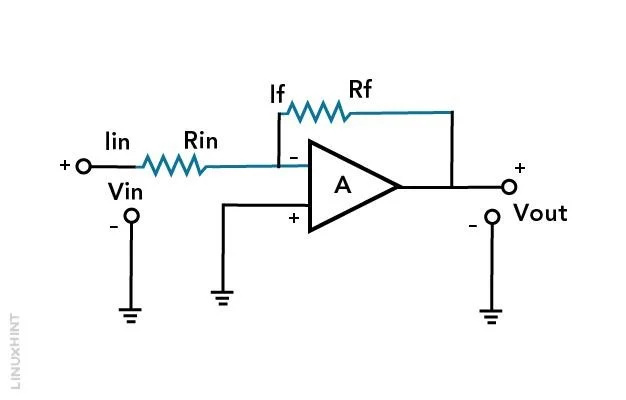
負帰還演算増幅器 (オペアンプ) 回路は、オペアンプを中心コンポーネントとして使用して設計されています。オペアンプには 2 つの入力があり、1 つは反転 (-)、もう 1 つは非反転 (+) です。出力端子が1つあります。負帰還システムにはオペアンプの反転側を使用します。
この回路には通常、次のものが含まれます。
- 単一ソースをオペアンプの反転 (-) 入力に接続する入力抵抗 (Rin)。
- オペアンプの出力を反転 (-) 入力に接続する帰還抵抗 (Rf)。
- オペアンプの出力における負荷への接続。
Rf と Rin の比を使用してゲインを見つけることができます。この負のフィードバックにより、オペアンプの動作が安定し、制御されます。これは、2 つの反転入力と非反転入力間の電圧の差を最小限に抑えることによって機能します。それらの間に仮想的な短絡が作成されます。その結果、オペアンプは出力電圧を調整してこのバランスを維持し、ゲインが制御された効果的なアンプになります。
例 1: 閉ループ ゲインの計算
システムのゲインはフィードバックなしで 60 dB です。負のフィードバックの割合は 1/20 で、負のフィードバックを追加した場合の閉ループ ゲイン (dB 単位) を求めます。
解決:
負のフィードバックを伴う閉ループ ゲインは、次の式で与えられます。

この場合、開ループ ゲインは 60 dB、フィードバック率は 1/20 です。

したがって、フィードバック率が 1/20 の場合、システムの閉ループ ゲインは 86.02 dB になります。
例 2: 電圧ゲインの計算
アンプが最初に 3000 の電圧ゲイン (フィードバックなし) を持ち、その後 mv = 0.01 のフィードバック部分を持つ負の電圧フィードバックを構成するとします。アンプの新しい電圧ゲインはいくらになりますか?
解決 :
負の電圧フィードバックを備えたアンプの電圧ゲインの公式を使用して、アンプの電圧ゲインを計算できます。

上の式では次のようになります。
あ f = フィードバック付きの電圧ゲイン
あ = フィードバックなしの電圧利得
MV = フィードバック分数
ここに次のものがあります:
フィードバックなしの電圧利得 (A) = 3000
フィードバック部分 (MV) = 0.01
次に、これらの値を式に代入します。
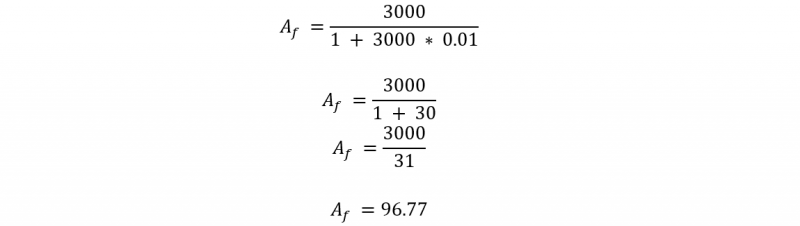
したがって、負の電圧フィードバックを備えたアンプの電圧ゲインは約 96.77 になります。
例 3: 帰還抵抗の計算
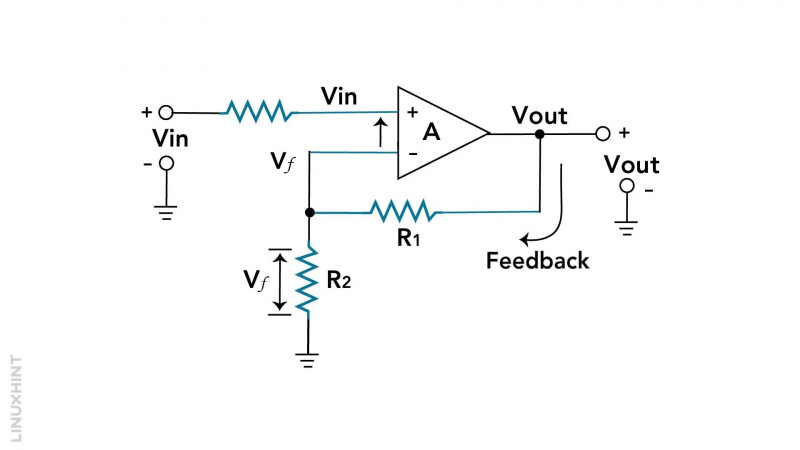
フィードバック抵抗 R の適切な値を決定します。 1 とR 2 。 220,000 の開ループ電圧ゲイン (AVOL) のオペアンプを使用して、非反転増幅回路を安定させる必要があります。目標とする閉ループ ゲインは 40 です。
解決 :
一般的な閉ループ フィードバック方程式は次のとおりです。

フィードバック部分 β を取得するには、上記の方程式を並べ替えます。
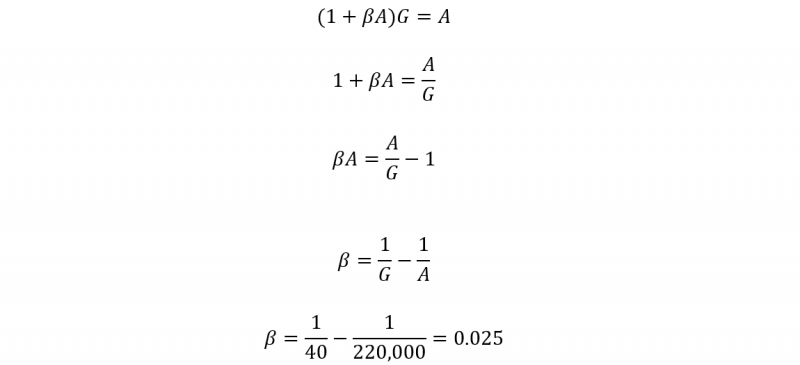
この場合、開ループゲインが高すぎます。したがって、フィードバック部分 β は、閉ループ ゲイン 1/G の逆数にほぼ等しくなります。 1/A の値が小さすぎるため、(0.025) にほぼ等しくなります。
上記構成における抵抗R1とR2は直列分圧回路を構成しています。閉ループ電圧ゲインは次のようにして求めることができます。

R2 の値を 1000 Ω (1 kΩ) と仮定します。次に R の値 1 次のように書くことができます
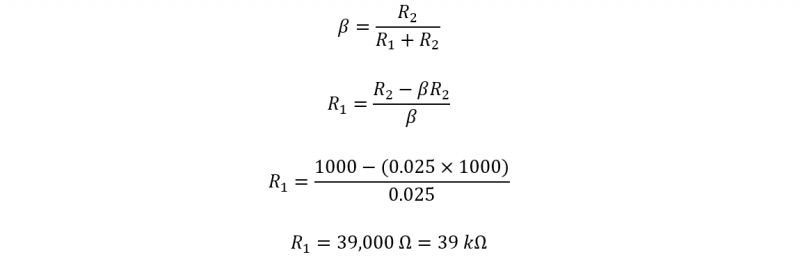
したがって、ゲイン 40 の非反転増幅回路の場合、R を選択する必要があります。 1 39kΩとR 2 1kΩ。
正帰還システムと負帰還システムの違い
以下の表で、正のフィードバック システムと負のフィードバック システムの違いを確認できます。
| フィードバックの種類の違い | 正のフィードバック | 否定的なフィードバック |
|---|---|---|
| 意味 | このフィードバックには、基準フィードバックと入力信号が加算されます。 | このタイプでは、出力フィードバックがリファレンス入力から減算されます。 |
| 命名法 | 正のフィードバックまたは回生フィードバック。 | 負のフィードバックまたは変性フィードバック。 |
| 目的 | 信号を増幅または増加させます。 | 信号を安定化または調整します。 |
| システムへの影響 | 予測できない動作や発振を引き起こす可能性があります。 | 予測可能性と定常状態の動作を促進します。 |
| ゲイン方向 | システムゲインを増加させます。 | システムのゲインを下げます。 |
| 使用法 | オーディオアンプとリラクゼーションオシレーター。 | オペアンプ (Op-Amp)、フィードバック制御システム。 |
| 安定性 | 不安定になることが多いです。 | システムの安定性が向上します。 |
| 例えば | シュミットトリガーとフリップフロップ。 | 電圧アンプ、温度コントローラー。 |
負帰還システムの応用と性質
負帰還システムは、一般的な電子機器に多くの用途があります。これらのシステムにより、システムの不安定性、システムの線形性、周波数応答、およびステップ応答が改善されました。負帰還システムのこれらの利点により、電子機器全体の多くの増幅回路は負帰還システムを備えています。
負のフィードバック システムの詳細な説明を以下に示します。
安定性 : 負帰還システムにより、目標点からの偏差が減少し、システムがより安定します。たとえば、サーモスタットは、温度が選択した値に近い状態に保たれるようにします。
精度: 負のフィードバック システムは、エラーを最小限に抑えてシステムの精度を向上させます。増幅回路では、負帰還によって歪みが軽減され、出力でより安定した信号が生成されます。
帯域幅制御 : 負帰還システムを利用してアンプの帯域幅を制御することもできます。これにより、いくつかの用途に適したものになります。これらのアプリケーションには、オーディオ増幅から無線周波数増幅までが含まれます。
ノイズ減少 : 負のフィードバックにより、不要なノイズや干渉を軽減できます。ノイズリダクションには、オーディオ システムや通信デバイスの分野でさまざまな用途があります。
動的応答 : 負帰還システムは動的応答能力を備えています。これらのシステムは、与えられた条件に応じて調整できます。動的応答の例には、車のクルーズ コントロール システムが含まれます。
帯域幅に対する負のフィードバックの影響
帯域幅は、ゲインが一定のアンプの動作周波数範囲を説明します。システムの帯域幅が広いということは、アンプがより多くの周波数を処理できることを意味します。負帰還は入力側に出力を与えることでアンプのゲインを下げます。これにより、システムの安定性と直線性が向上しますが、その結果、システム ゲインも低下します。
の 帯域幅に対する負のフィードバックの影響 適用されるフィードバックの種類と量によって異なります。一般に、負のフィードバックはシステム ゲインを減少させることにより帯域幅を増加させます。アンプの性能の尺度であるゲイン帯域幅積は、フィードバックに関係なく一定のままです。
例えば 、ゲインが 100、帯域幅が 10 kHz のフィードバックのない増幅回路を考えます。負のフィードバックを適用してゲインを 10 に下げます。これにより、帯域幅が 100 kHz に増加します。どちらの場合でも、ゲインと帯域幅の積は 100 × 10 kHz = 1 MHz です。
ただし、負帰還はアンプのカットオフ周波数にも影響します。これらは、システム ゲインが最大値から低下する周波数です。負のフィードバックはカットオフ周波数を下げ、上部のカットオフ周波数を上げます。これにより、アンプの周波数応答曲線が広がります。帯域幅に対する負のフィードバックの最終的な影響は、ゲインと引き換えに帯域幅を犠牲にすることです。
これは、負帰還を適用すると、アンプが処理できる周波数の範囲が広がることを意味します。しかし、これにはすべて増幅率の低下という代償が伴います。
結論
負帰還システムは、入力側で出力の一部を提供することにより、出力を制御または調整できます。このフィードバックによりエラー信号が生成され、システムがより安定します。このエラー信号は動的であり、システム全体を駆動します。負のフィードバック システムにより、システムの精度が向上し、帯域幅も制御できます。このフィードバック システムは、ノイズ キャンセルや車のクルーズ コントロール システムなどの増幅回路で使用されます。否定的なフィードバックの詳細については、この記事をご覧ください。